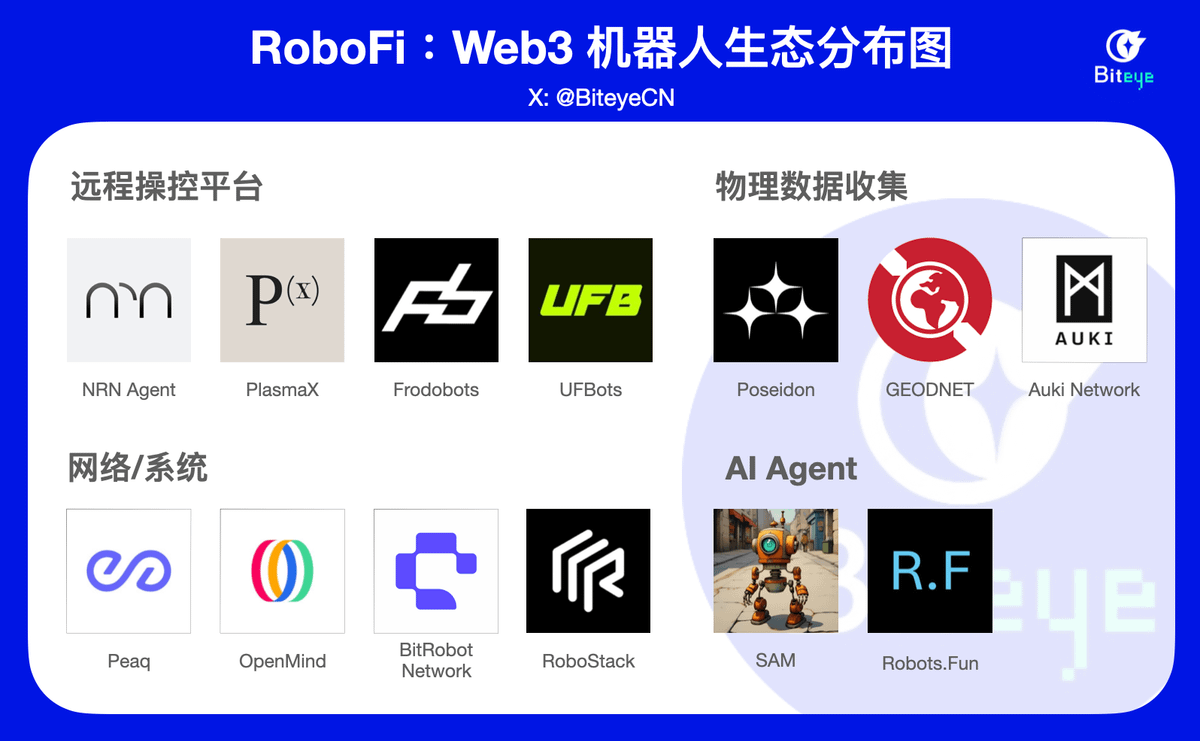
????AI는 LLM(법학 석사)보다 훨씬 더 중요합니다! 머스크는 최근 발표한 궁극적인 AI 계획에서 테슬라 미래 가치의 80%가 로봇에서 나올 것이라고 장담했습니다! 로봇 관련 주가가 급등하면서 Web3 로봇 프로젝트가 가속화되고 새로운 열풍이 불고 있습니다. 탈중앙화된 온체인 협업 지능형 생태계는 우리의 미래를 어떻게 바꿀까요?
Biteye를 팔로우하고 Web3 로봇 레이스에서 새로운 스타를 획득하세요! ????
- @오픈마인드_아기
키워드: 운영 체제, 분산 조정 계층
오픈마인드(OpenMind)는 오픈 소스 시스템을 통해 로봇의 이해력과 학습 능력을 향상시키고자 2천만 달러의 자금을 조달했습니다. 주요 제품은 다음과 같습니다.
OM1: "로봇용 안드로이드"로 알려진 AI 기반 운영 체제는 하드웨어에 독립적이며 오픈 소스입니다. OM1은 기계에 지각, 기억, 계획 및 제어 기능을 제공하여 세상을 이해하고 상황에 맞는 행동을 취할 수 있도록 지원합니다. 이전 해커톤 참가자는 OM1을 사용하여 48시간 만에 알츠하이머 치료 로봇을 제작했습니다.
FABRIC: 분산형 조정 계층. 블록체인을 통해 로봇이 데이터를 공유하고, 언어 등을 빠르게 학습하며, 합의, 실행 및 결제를 지원할 수 있도록 합니다.
- @피크
키워드: 레이어 1, 머신 경제
peaq는 2,100만 달러를 모금했으며, DePIN과 머신 경제에 중점을 둔 Layer 1입니다.
Peaq는 로봇, 드론, 센서 및 기타 기계 장치가 블록체인에서 자체 주권 ID를 획득하고, P2P 결제를 수행하고, 데이터를 저장하고, 운영을 자동화할 수 있도록 지원합니다. 이를 통해 로봇 대여, 드론 배송, 자율적인 기계 협업과 같은 사용 사례를 구현하여 로봇과 기타 장치가 AI 에이전트처럼 독립적으로 수익을 창출하고 상호 작용할 수 있는 완전한 "기계 경제"를 구축합니다.
Substrate 프레임워크 기반으로 구축되고 Polkadot과 호환되는 이 프로젝트는 90개 이상의 블록체인과 연결되어 있습니다. 현재 peaq 체인에는 Silencio(소음 모니터링), MapMetrics(운전 중 수익 창출), Farmsent(농업 공급망), Natix(스마트 운전) 등 50개 이상의 DePIN 프로젝트가 있습니다. 이 네트워크는 450만 대 이상의 기기와 기계를 연결하여 에너지, 모빌리티, 운송, 농업, 환경 등 20개 이상의 산업 분야에 분산형 네트워크 서비스를 제공합니다.
- @GEODNET_
키워드: 실시간 위치 네트워크
GEODNET은 1,500만 달러를 모금하고 위치 지정 서비스에 중점을 두고 있습니다. 분산형 방식으로 세계 최대의 실시간 이동측량(RTK) 위치 지정 네트워크를 구축하여 글로벌 항법 위성 시스템(GNSS) 서비스의 센티미터 수준 정확도를 제공합니다.
이 프로젝트는 원래 Polygon 기반으로 구축되었으며, 현재는 Solana로 확장되었습니다.
이 네트워크를 통해 누구나 GEODNET 하드웨어 마이닝 장비("위성 마이닝 장비")를 구매하고 설치하고, RTK 보정 데이터를 수집하여 네트워크에 업로드하고, $GEOD 토큰 보상을 얻고, 궁극적으로 네트워크가 로봇, 자율 주행차, 드론, 메타버스와 같은 애플리케이션을 위한 고정밀 위치 지정 지원을 제공할 수 있게 됩니다.
이 네트워크는 현재 145개국, 19,000개 이상의 사이트를 포괄하고 있으며, 207,178GB가 넘는 RTK 데이터를 제공했습니다.
@psdnai
키워드: 물리적 데이터 수집
@StoryProtocol이 육성한 포세이돈은 시드 투자로 1,500만 달러를 모금했습니다. 그 자금은 주로 디스플레이의 물리적 수준에서 로봇 및 다중 모드 AI 에이전트와 같은 애플리케이션을 위한 교육 데이터 부족 문제를 해결하는 데 사용되었습니다.
포세이돈은 Story를 기반으로 한 분산형 데이터 계층을 구축하여 실제 데이터(예: 비디오, 오디오, 이미지, 위치 등)를 수집, 구성 및 관리하고, 궁극적으로 IP로 보호된 교육 데이터를 제공하여 AI 모델의 혁신을 가속화하는 데 도움을 줍니다.
APP는 현재 온라인 상태이며, 사운드 정보부터 시작하여 사용자가 APP에 사운드 정보를 업로드하여 AI 모델을 훈련시켜 다양한 악센트, 방언 및 환경의 음성을 처리할 수 있도록 합니다.
- @프리즈마Xai
키워드: 원격운영, 훈련 데이터
a16z CSX가 이끄는 PrismaX는 총 1,100만 달러의 자금을 조달했습니다. PrismaX는 인간의 개입을 통해 로봇이 고도의 자율성을 확보하도록 지원하는 것을 목표로 합니다.
현재 이용 가능한 원격 운영 플랫폼은 사용자가 브라우저를 통해 로봇 팔을 원격으로 조작할 수 있도록 지원하며, 이 운영 데이터를 모델 최적화를 위한 고품질 훈련 데이터로 변환합니다. 운영자는 이 과정에서 플랫폼 토큰 보상을 받게 됩니다.
이 플랫폼은 앞으로 Yushu, UBTECH 등 유명 로봇과 원격으로 연결할 수 있을 것으로 기대됩니다.
단기적으로는 모델 학습을 위한 원격 제어와 시각적 데이터에 집중할 것입니다.
중기적으로 로봇은 원격 인간 제어를 통해 실제 작업을 완료할 수 있게 될 것입니다.
장기적으로 궁극적인 목표는 로봇의 완전하거나 높은 자율성을 달성하는 것입니다.
- @NRNAgents
키워드: 원격운영, 강화학습, AI 에이전트
NRN Agents는 Arbitrum에서 구동되는 분산형 AI 에이전트 개발 및 훈련 플랫폼입니다. 초기에는 게임 내 AI 에이전트에 중점을 두었지만, 현재는 로봇 구현에 사용되는 AI 에이전트로 확장하고 있습니다. NRN Agents는 "Sim-to-Real" 프레임워크를 통해 로봇 AI 에이전트를 위한 효율적인 훈련 및 배포 솔루션을 제공합니다.
사용자는 브라우저를 통해 시뮬레이션된 로봇을 직접 제어할 수 있으며, 각 작업은 고품질의 행동 데이터를 생성하여 로봇 시스템의 모방 학습을 위한 훈련 자료를 제공합니다. 동시에 시스템 내의 AI 에이전트는 완전한 재교육 없이도 강화 학습을 통해 실제 상호작용을 기반으로 지속적으로 최적화될 수 있습니다.
이 프로젝트는 현재 초기 단계에 있으며, 주로 로봇 팔(RME-1)의 작동에 중점을 두고 있습니다. 향후 로봇의 전투 능력, 육상 경기, 그리고 기타 경쟁 스포츠 분야로의 확장을 목표로 개발될 예정입니다.
- @AukiNetwork
키워드: DePIN 네트워크, 물리적 세계 데이터, 위치 데이터
Auki Network는 로봇과 지능형 기계를 위한 분산형 신경망을 구축하여 물리적 세계에 대한 더 깊은 이해를 제공하는 것을 목표로 합니다. 핵심 사업은 다양한 기기(예: 로봇, 스마트 안경)가 위치 및 인식 데이터를 실시간으로 공유하여 협업적인 공간 이해를 구축할 수 있도록 하는 DePIN 네트워크를 구축하는 것입니다.
Posemesh 프로토콜을 기반으로 하는 이 네트워크는 컴퓨팅 리소스를 제공하는 컴퓨트 노드, 모션 및 센서 데이터를 제공하는 모션 노드(로봇과 같은 지능형 장치로 구성), 모션 노드를 사용하여 3D 지도 또는 공간 모델을 생성하는 재구성 노드, 그리고 이러한 3D 공간을 관리하는 도메인 네임 노드로 구성됩니다. 이러한 노드는 기여도에 따라 $AUKI 토큰을 보상으로 받습니다.
- @RoboStack_io
키워드: 하드웨어 복잡성 추상화, 하드웨어 및 소프트웨어 통합 단순화
RoboStack은 클라우드 네이티브 시뮬레이션 및 통합 플랫폼입니다. 로봇 개발 및 배포를 위한 사실적인 환경 모델링과 확장 가능한 컴퓨팅 인프라를 제공할 뿐만 아니라, 다양한 하드웨어, 소프트웨어 및 통신 표준에 걸쳐 로봇 컨텍스트 프로토콜(RCP)을 통해 표준화된 통신 프로토콜을 구축하여 소프트웨어 수준에서 기본 로봇 하드웨어와 AI 에이전트 간의 연결을 간소화합니다.
네이티브 토큰 $ROBOT이 가상 플랫폼에 출시되었습니다. 사용자는 가상 게임에서 $ROBOT 스테이킹에 참여하고 SIM Lord에서 마음에 드는 로봇 프로젝트에 투표하여 보상을 받을 기회를 얻을 수 있습니다.
- @프로도봇
키워드: 보도 로봇
프로도봇 랩(FrodoBots Lab)은 게임화를 활용하여 현실 세계 데이터 수집과 체화된 지능 개발을 촉진하는 로봇 공학 연구소입니다. 핵심 제품인 어스 로버(Earth Rover)는 원격 조종 보도 로봇(보도 위를 걷는 로봇)으로, 가격은 249달러에서 399달러 사이입니다. 게임, 데이터 수집, AI 연구에 활용할 수 있습니다. 프로도봇은 전 세계에 수백 대의 어스 로버를 배치했으며, 2,000시간 분량의 실제 주행 데이터 세트를 오픈소스로 공개했습니다.
FrodoBots는 혁신적인 로봇 하드웨어, 분산형 플랫폼, 그리고 AI 프레임워크를 통해 엔터테인먼트와 과학 연구를 통합하는 생태계를 구축했습니다. 주요 프로젝트는 다음과 같습니다.
9.1. @비트로봇네트워크
키워드: 분산 서브넷 아키텍처
솔라나(Solana) 기반으로 구축되고 프로도봇 랩(FrodoBots Lab)과 프로토콜 랩스(Protocol Labs)가 공동 개발한 탈중앙화 플랫폼인 비트로봇 네트워크(BitRobot Network)가 600만 달러의 투자를 유치했습니다. 이 네트워크는 서브넷 아키텍처를 활용하며, 각 서브넷은 컴퓨팅 파워, 로봇, 데이터 세트(실제 또는 합성), AI 모델 등 특정 리소스를 제공합니다. 이러한 서브넷은 보도 로봇부터 휴머노이드 로봇까지 다양한 폼 팩터를 지원합니다. 첫 번째 서브넷인 ET 후지(ET Fuji)가 출시되었으며, 자세한 내용은 아래에서 확인할 수 있습니다.
9.2. @ET_Fugi
키워드: 게임, 원격 제어 플랫폼 Tele-op
ET Fugi(Extra-Terrestrial Fugitives)는 플레이어가 지구 탐사차를 원격으로 조종해 "외계인" NFT를 포획하고, 로봇 AI 훈련을 위한 귀중한 보도 데이터를 생성하며 FrodoBots 포인트(FBP)와 같은 보상을 얻는 실제 로봇 게임입니다.
9.3. @사미스무빙
키워드: AI 에이전트, 프레임워크
SAM은 원래 FrodoBots와 @virtuals_io가 Earth Rover를 원격으로 운영하기 위한 AI 에이전트로 개발했습니다. 이후 Robots.Fun(Launchpad) 플랫폼에서 AI 에이전트를 실행하기 위한 핵심 프레임워크로 발전했습니다. 이후 모든 AI 에이전트는 SAM 아키텍처를 기반으로 구축되며 5%의 수수료를 지불합니다.
SAM은 Earth Rover를 통해 운영 데이터를 수집하여 AI 에이전트의 전반적인 역량을 향상시킵니다. 또한 X(트위터)를 통해 모험의 일부를 라이브 스트리밍하여 특정 상호작용, 경쟁, 데이터 수집 시나리오를 선보이며, 재미와 교육적 가치를 모두 제공합니다.
9.4. @로봇닷펀
키워드: AI 에이전트 출시 플랫폼
Robots.Fun은 로봇 AI 에이전트를 출시하는 플랫폼입니다. 데이터를 수집하고 매일 경쟁(예: 외계 NFT 획득)을 통해 AI 에이전트를 강화합니다. Robots.Fun에서 AI 에이전트를 생성하려면 AI 에이전트의 "본체" 역할을 하는 Earth Rover 로봇을 소유하거나 구매해야 합니다.
9.5. @UF봇
키워드: 로봇 격투, 원격 조종 플랫폼 Tele-op
Ultimate Fighting Bots는 사용자가 Booster T1 기반 휴머노이드 로봇을 원격으로 조종하여 전투에 참여할 수 있는 무료 로봇 배틀 클럽입니다. 이 플랫폼은 사용자에게 몰입감 넘치는 엔터테인먼트 경험을 제공하는 동시에, 구현된 AI를 훈련하기 위한 실제 데이터를 생성합니다.
요약하다
위의 프로젝트를 이해한 후에는 Web3 로봇 트랙의 두 가지 핵심 장점을 명확하게 알 수 있습니다.
- 블록체인의 분산화 장점은 로봇 모델과 데이터의 희소성 장벽을 깨뜨릴 것으로 기대됩니다.
- 체인상의 재산권과 인센티브 메커니즘은 로봇 경제에 새로운 활력과 지속 가능성을 불어넣었습니다.
Web3 봇의 미래에 대해 어떻게 생각하시나요? 주목할 만한 다른 기회나 과제는 무엇이라고 생각하시나요? 댓글로 Biteye에 여러분의 생각을 공유해 주세요! ????