


 ,
,
On May 25, the world's first combat competition with humanoid robots as the main participants, the "CMG World Robot Competition Series" mecha fighting competition, was held in Hangzhou. There were 4 teams participating in this competition, and each team was manually controlled by real players to remotely control the Yushu G1 robot to compete, presenting 9 combat moves such as jabs, hooks, kicks, and dodges. Under the observation of professional combat referees, the four teams fought for three rounds and nine rounds, and finally the "AI Strategist" controlled by an artificial intelligence blogger, who was covered in "injuries", won the championship.
What is the significance of holding a robot fighting competition?
Wang Qixin, director of Yushu Technology, responded that he hopes that through this competition, first of all, he can announce to everyone the extent to which the robot algorithm has been improved and the extent to which the software-level research and development has been achieved; secondly, he hopes to use this to verify the structure of the robot and make subsequent improvements; finally, he hopes that everyone will know the level of robot application.
It is reported that the G1 robot participating in this fighting competition is equipped with many sensors to collect the movement trajectories of the robot's wrist, waist and legs, and then "feed" the data to the AI model, making the AI model smarter through deep learning.
This article analyzes the different performances of humanoid robots in fighting arenas from the perspective of decentralized cloud computing, combined with robots, AI models and algorithms.
Traditional cloud computing architecture mainly relies on remote data centers to upload the perception data collected by robots to the cloud for processing, and then return the instructions. This model is acceptable in static or weakly interactive scenarios (such as factory robotic arms), but it faces significant bottlenecks in highly dynamic and highly confrontational scenarios such as robot fighting, which are reflected in high latency, bandwidth pressure, and poor stability (easy to interrupt).
In the decentralized cloud computing scenario, the above bottlenecks will be significantly improved. It should be noted that the decentralized cloud computing referred to in this article refers to cloud computing in the DePIN field, a decentralized cloud computing network running on the blockchain, combining edge computing, intelligent computing, DeCloud, AI technology, cryptocurrency, NFT, DID (decentralized identity), and DAO governance.
1. Dynamic real-time performance is greatly improved
If the robot's posture feedback (inertial reaction, change in foot support force) at the moment of punching relies on traditional cloud computing, high latency is likely to cause unbalanced movement or defensive failure.
However, in a decentralized cloud computing scenario, robots can transmit and calculate data through nearby edge device nodes. If edge device resources are limited, they can call on the computing power pool of nearby nodes to complete complex tasks. At the same time, on-chain governance can adjust the price and priority of computing power to achieve market-oriented and efficient scheduling.
Robots can also deploy edge computing chips as nodes of the decentralized cloud computing network, which can achieve millisecond-level action correction and stable center of gravity feedback. For example, in multiple rounds of fighting, the AI agent can learn to predict the opponent's moves based on historical trajectories and opponent movements, and the local AI model can "evolve" in real time through data feedback to form a personalized "fighting style";
On the other hand, each robot equipped with "individual intelligence" can form a "tactical team" by coordinating defense and offense based on the consensus decision-making system on the chain under the supercomputing intelligence computing capability and the decentralized network coordinated scheduling on the chain. Under deep learning, robots may know how to win in robot fights better than humans, which in turn provides strategic suggestions for human operators.
2. Data is no longer stored in the cloud, and privacy and system robustness are enhanced
The large amount of data collected during robot fighting (motion trajectory, motor torque, impact feedback) can be directly iterated and trained in the local AI model to avoid the risk of concentrated leakage due to attacks; and multiple robots can be interconnected with the edge model through on-chain identity authentication to form an interference-resistant collaborative network.
If we go a little further, robots combined with Web3 (RWA) can also create new sparks. For example, the fighting strategy model trained by each robot can be published, sold or shared on the chain, or the data of the champion type robot model can be minted and circulated on the chain, which can form a Web3 construction of "skills are assets".
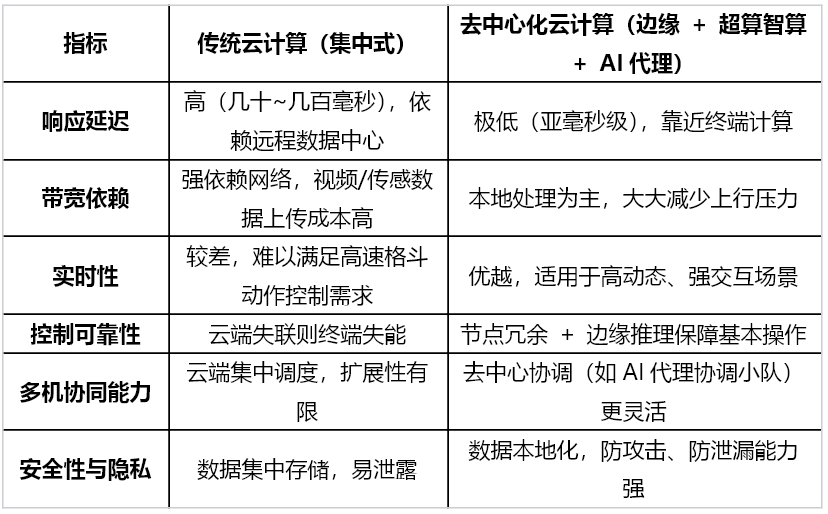
Comparison of the adaptability of traditional cloud computing vs decentralized cloud computing in humanoid robots
summary
In a competitive environment like the CMG World Robot Competition, which places extremely high demands on stability, response speed, and intelligent decision-making, traditional cloud computing is no longer applicable due to high latency and poor real-time performance. Decentralized cloud computing systems, especially network architectures with edge reasoning, supercomputing, and intelligent agent orchestration capabilities, will be more suitable for supporting the fighting or collaborative behaviors of humanoid robots in the future.
Decentralized cloud computing (DePIN) has always been regarded as the infrastructure of Web3 projects, but as an infrastructure, it faces the whole world. In the field of robotics, it becomes a computing network collaboration system of the robotics society, driving hundreds of millions of "embodied intelligent agents" to perceive the world, act collaboratively, and evolve in real time.
In addition to computing, the bottlenecks currently faced by humanoid robots also include algorithm models, battery life, thermal management and other issues that need to be improved.
"In the future, we need to continue to invest in basic areas such as basic hardware, bionic motion algorithms, and general AI models to achieve a real leap from arena performances to practical scenarios," concluded Lu Hanchen, director of the Gaogong Robot Industry Research Institute.
refer to:
