


 、
、
5月25日、世界初の人型ロボットが参加する格闘競技として知られる「CMG世界ロボット競技シリーズ」メカ格闘アリーナ競技会が杭州で開催された。この大会には合計4チームが参加します。各チームは実際のプレイヤーで構成され、Yushu G1 ロボットを手動で操作して、ジャブ、フック、キック、ドッジなどの 9 つの格闘技を実行して互いに競い合います。プロの格闘技審判員が見守る中、4チームが3ラウンドと9ラウンドの戦いを繰り広げ、最終的に人工知能ブロガーが操作する、あざだらけの「AIストラテジスト」が優勝した。
ロボット格闘競技会を開催する意義は何でしょうか?
玉樹科技の王其新ディレクターは、まずこのコンテストを通じて、ロボットのアルゴリズムがどれだけ改善されたか、ソフトウェアレベルの研究開発がどれだけ達成されたかを皆に発表できればと期待していると答えた。第二に、これを利用してロボットの構造を検証し、その後の改良に役立てたいと考えている。最後に、ロボット応用のレベルを誰もが知ってほしいと願っています。
この格闘競技に参加しているG1ロボットには、ロボットの手首、腰、脚の動きの軌跡を収集するための多くのセンサーが搭載されており、そのデータをAIモデルに「フィード」し、ディープラーニングを通じてAIモデルをより賢くしていると報じられています。
この記事では、ロボット、AI モデル、アルゴリズムを組み合わせた分散型クラウド コンピューティングの観点から、格闘技アリーナにおけるヒューマノイド ロボットのさまざまなパフォーマンスを分析します。
従来のクラウド コンピューティング アーキテクチャは、主にリモート データ センターに依存して、ロボットによって収集された認識データをクラウドにアップロードして処理し、その後指示を返します。このモードは、静的または弱いインタラクティブ性のシナリオ (工場のロボット アームなど) では許容されますが、ロボットの戦闘などの非常に動的で対立的なシナリオでは大きなボトルネックが発生し、レイテンシの増加、帯域幅の圧迫、および安定性の低さ (中断しやすい) として現れます。
分散型クラウド コンピューティングのシナリオでは、上記のボトルネックは大幅に改善されます。なお、本稿で言及する分散型クラウドコンピューティングとは、ブロックチェーン上で稼働し、エッジコンピューティング、インテリジェントスーパーコンピューティング、DeCloud、AI技術、暗号通貨、NFT、DID(分散型アイデンティティ)、DAOガバナンスなどを組み合わせた分散型クラウドコンピューティングネットワークであるDePIN分野のクラウドコンピューティングを指します。
1.動的リアルタイムパフォーマンスが大幅に向上
ロボットがパンチを打つ瞬間の姿勢フィードバック(慣性反応、足の支持力の変化)を従来のクラウド コンピューティングに依存している場合、遅延が大きくなると、動きのバランスが崩れたり、防御に失敗したりする可能性が高くなります。
ただし、分散型クラウド コンピューティングのシナリオでは、ロボットは近くのエッジ デバイス ノードを介してデータを送信および計算できます。エッジ デバイスのリソースが限られている場合は、近くのノードのコンピューティング パワー プールを呼び出して複雑なタスクを完了できます。同時に、オンチェーンガバナンスはコンピューティング能力の価格と優先順位を調整して、市場指向の効率的なスケジューリングを実現できます。
ロボットは、エッジ コンピューティング チップを分散型クラウド コンピューティング ネットワークのノードとして展開することもできます。これにより、ミリ秒レベルの動作補正と安定した重心フィードバックを実現できます。たとえば、複数ラウンドの戦闘では、AI エージェントは過去の軌跡や動きに基づいて相手の動きを予測することを学習し、ローカル AI モデルはデータフィードバックを通じてリアルタイムで「進化」し、パーソナライズされた「戦闘スタイル」を形成できます。
一方、「個別知能」を搭載した各ロボットは、スーパーコンピューティング能力の下でオンチェーンのコンセンサス意思決定システムに基づいて防御と攻撃を調整し、チェーン上の分散型ネットワークの協調スケジューリングと組み合わせることができます。同じ戦線にいるロボットは、オンチェーンのコンセンサス意思決定システムに基づいて、協調した防御と攻撃を通じて「戦術チーム」を形成することもできます。ディープラーニングにより、ロボットはロボット同士の戦いで勝つ方法を人間よりもよく理解できるようになり、それが人間のオペレーターに戦略的な提案をもたらすようになります。
2.データはクラウドに保存されなくなり、プライバシーとシステムの堅牢性が強化される
ロボットの戦闘中に収集された大量のデータ(動作軌跡、モータートルク、衝撃フィードバック)は、攻撃による集中的な漏洩のリスクを回避するために、ローカル AI モデルで直接反復してトレーニングできます。また、オンチェーン ID 認証を通じて複数のロボットをエッジ モデルと相互接続し、干渉に強い協調ネットワークを形成できます。
さらに進むと、Web3(RWA)と組み合わせたロボットもイノベーションの火花を散らす可能性があります。例えば、各ロボットがトレーニングした戦闘戦略モデルをチェーン上で公開、販売、共有したり、チャンピオン型ロボットモデルのデータを鋳造してチェーン上で循環させたりすることで、「スキルが資産」のWeb3構築を形成できます。
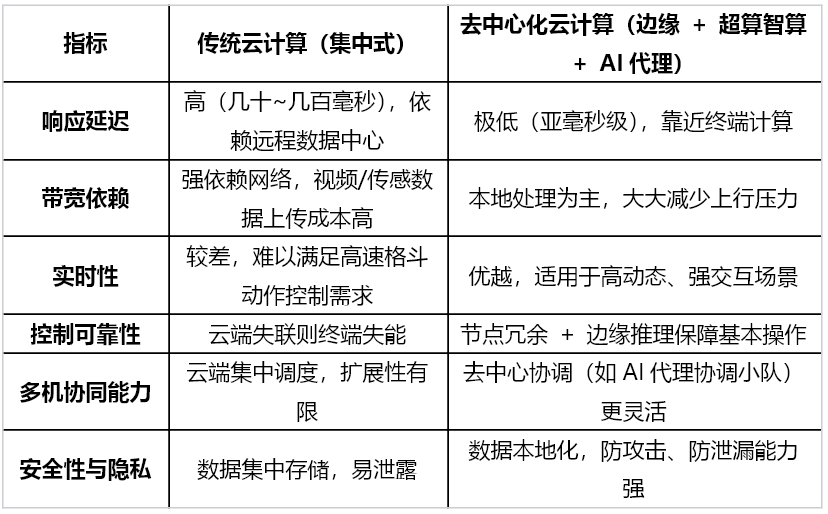
ヒューマノイドロボットにおける従来のクラウドコンピューティングと分散型クラウドコンピューティングの適応性の比較
まとめ
CMG 世界ロボット競技会のような、安定性、応答速度、インテリジェントな意思決定に極めて高い要求が課される競争的な環境では、従来のクラウド コンピューティングは、レイテンシが高く、リアルタイム パフォーマンスが低いため、もはや適用できません。分散型クラウド コンピューティング システム、特にエッジ推論、スーパーコンピューティング、インテリジェント エージェント オーケストレーション機能を備えたネットワーク アーキテクチャは、将来、ヒューマノイド ロボットの戦闘や協調動作をサポートするのにより適したものになります。
分散型クラウドコンピューティング(DePIN)は、これまで常にWeb3プロジェクトのインフラストラクチャとして考えられてきましたが、インフラストラクチャとしては全世界を対象としています。ロボット工学の分野では、ロボット社会のコンピューティングネットワークコラボレーションシステムとなり、数億の「具現化されたインテリジェントエージェント」を駆動して世界を認識し、協調して行動し、リアルタイムで進化させます。
ヒューマノイドロボットが現在直面しているボトルネックには、コンピューティングに加えて、アルゴリズムモデル、バッテリー寿命、熱管理など、改善が必要なその他の問題も含まれます。
「今後、アリーナでのパフォーマンスから実用的なシナリオへの真の飛躍を実現するために、基本的なハードウェア、バイオニックモーションアルゴリズム、汎用AIモデルなどの基礎領域への投資を継続する必要があります」と、高工ロボット産業研究所所長の陸漢塵氏は結論付けた。
参照:
